________________________________________________________
Last update:
<iframe src="https://neurdon.com/DIVINA_today_summary.html" name="targetframe" width="500" height="100" scrolling="Yes" frameborder="0" id="targetframe" allowtransparency="true" style="background: #FFFFFF; >
DIVINA today trading summary
DIVINA performance summary
DIVINA table
DIVINA individual trades
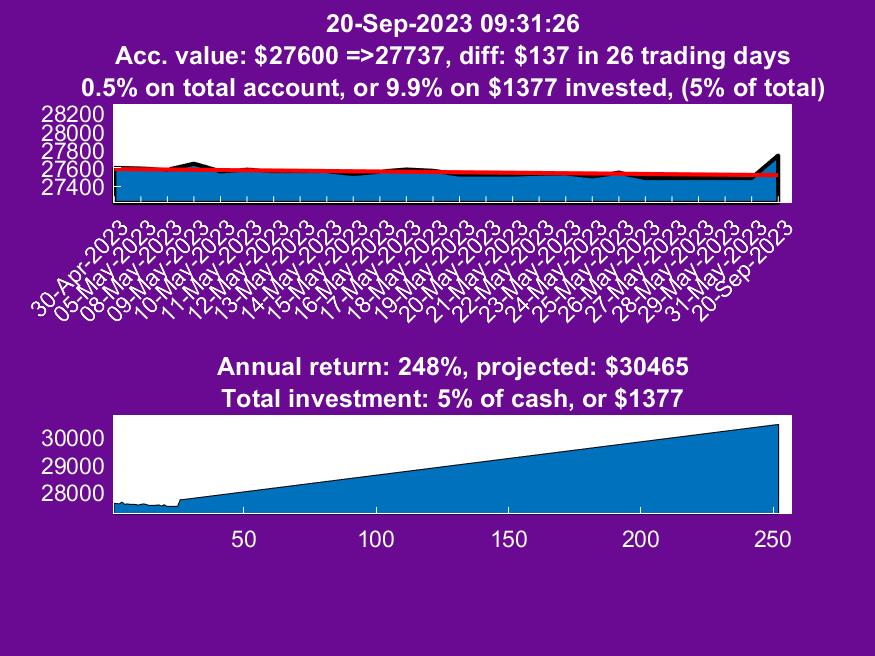
DIVINA plot

{kind=link}